首 页
资 讯
酷公司
事业线
资本论
科技控
国际FAN
创始人说
串儿吧
数 据
创业项目
投资人
投资机构
学 院
创业问答
创业文库
创业百科
服 务
上传项目
寻求报道
创始人说
活动
新芽榜
新芽微信公众号
新芽APP下载
登录
注册
新芽
数据
创业项目
智能柔性协作机器人
智能柔性协作机器人
关注
领域:
机器人
平台:不详
坐标:北京市
官网:不详
成立时间:2014-12-15
运营状态:不详
分享:
项目介绍
所属公司
相关资讯
项目介绍
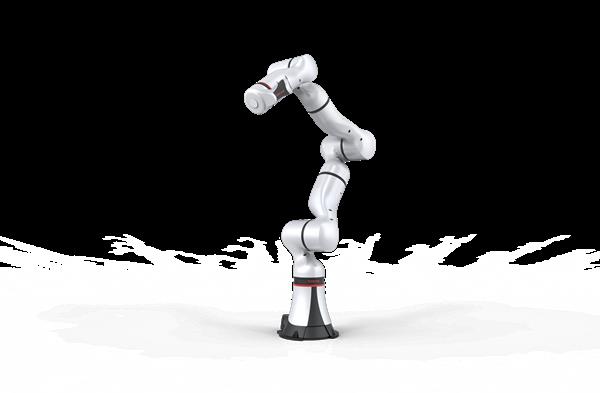
新一代柔性协作机器人 xMate,它具有的特点是:*安全、一触即停;*灵活,接近人手;*灵敏,精准触控。七轴设计,有更佳的灵活性和适应性,每个关节配备力的传感器,进行一个直接的力控的框架,七轴可以看到它可以在空间任何一个位置在可达的基础上可以非常适应推出不同机型的形态姿态,让机器人的布局非常方便。
公司简介
北京市
大道科技是一家专注于ServerSAN、分布式文件系统、高性能NAS等软件定义存储系统研发及产品服务的专业厂商,致力于为用户提供高效、智能的存储及数据管理解决方案。
新芽网友083236
项目联系人
关注
智能柔性协作机器人
该项目的用户
Copyright ©1999-2024 新芽
京ICP备17028573号-3
京公网安备 11010502030129号
京B2-20181248
加入我们
Rss订阅
Tag标签
意见反馈
APP
手机站
违法和不良信息举报电话:010-64158500-8113,18610056652 举报邮箱:
infoweb@zero2ipo.com.cn
举报网上不良信息